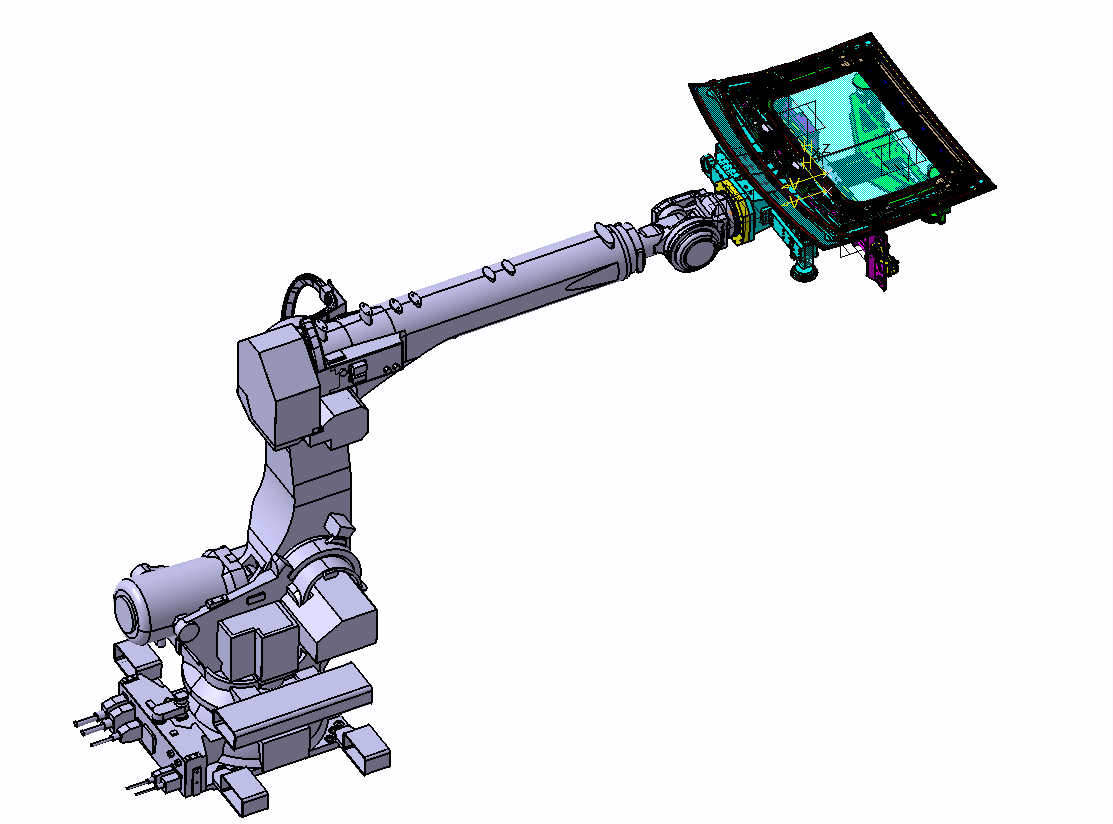
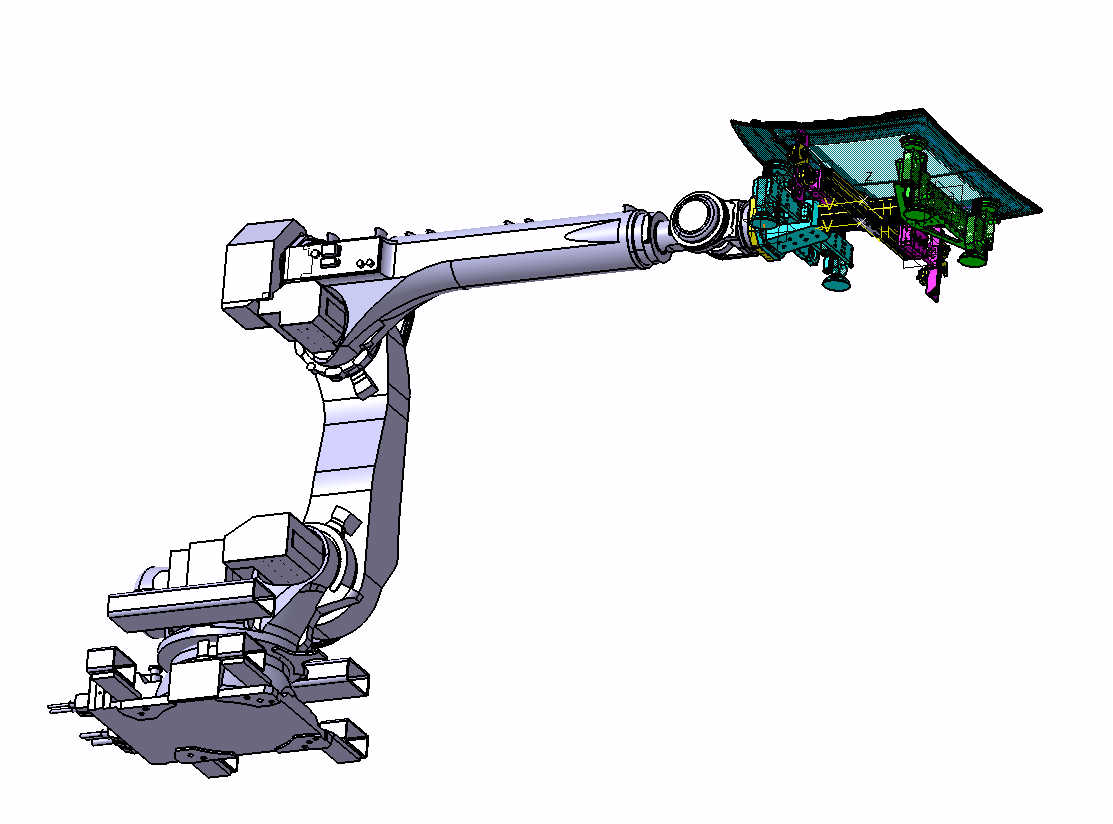
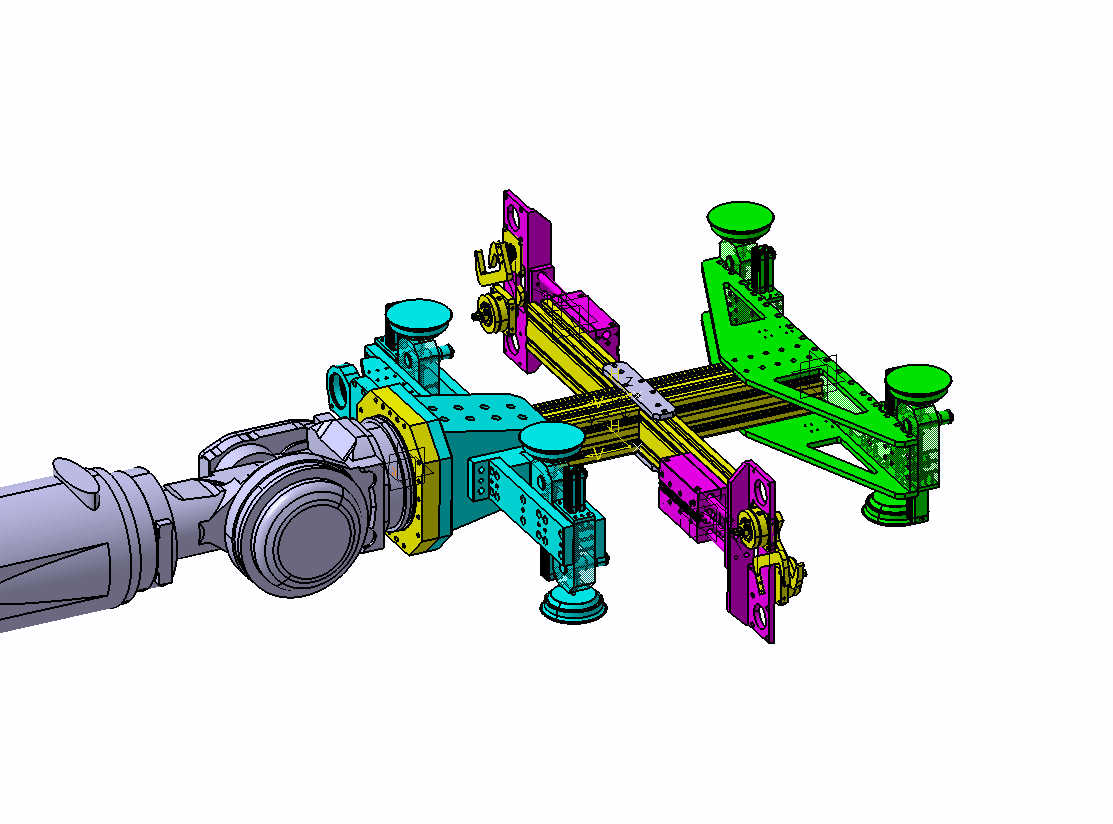
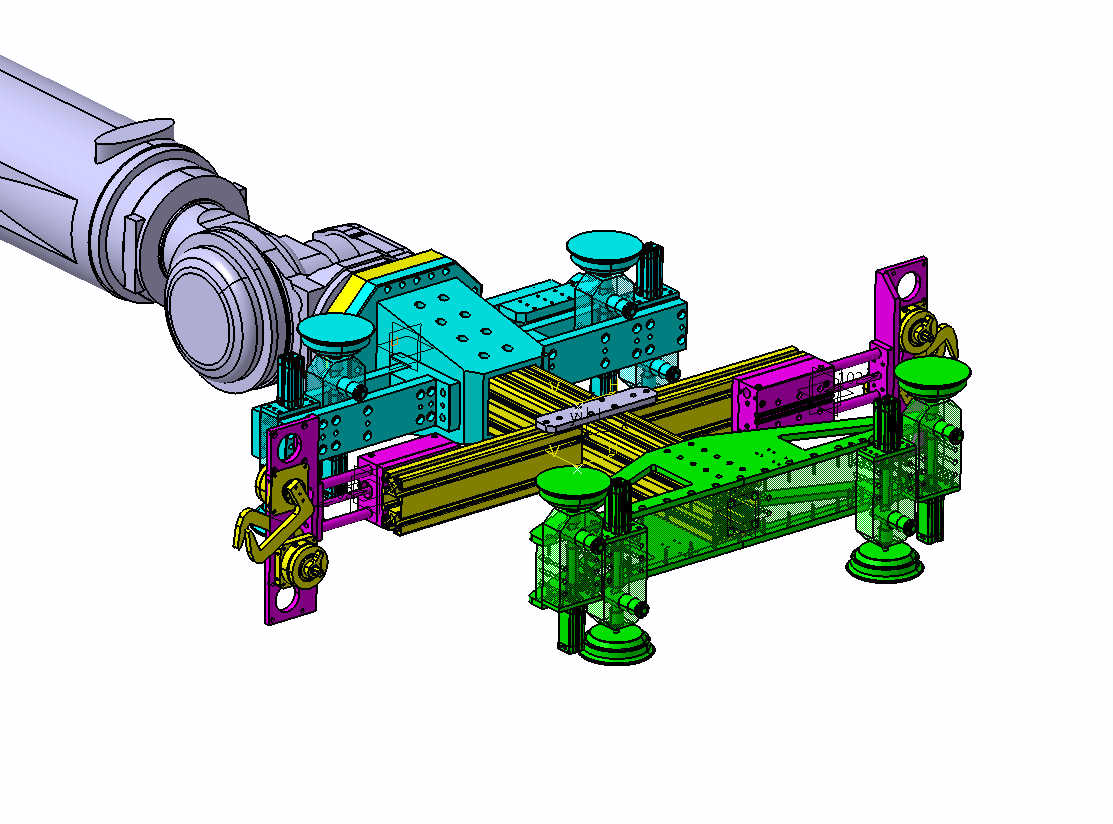
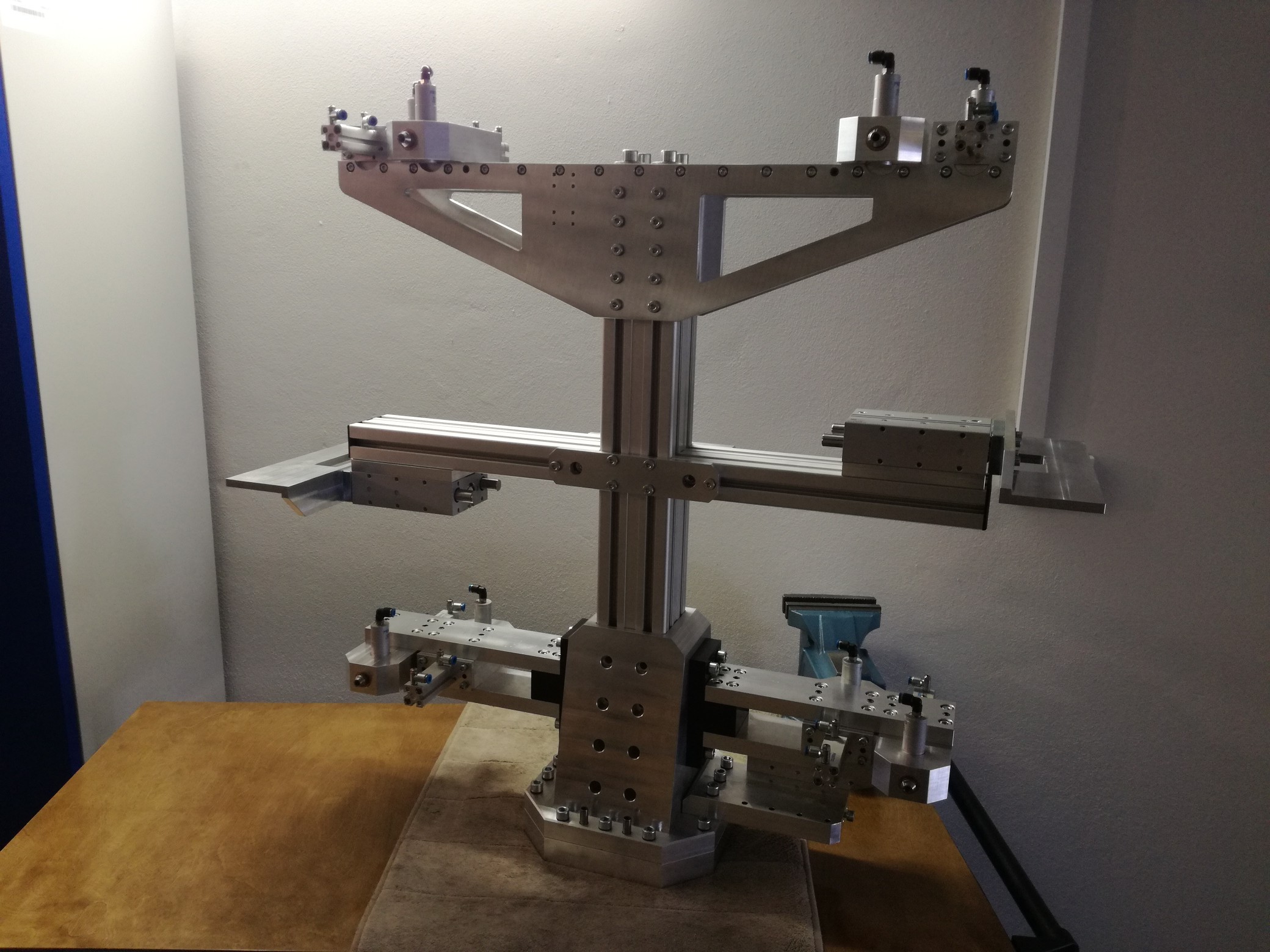
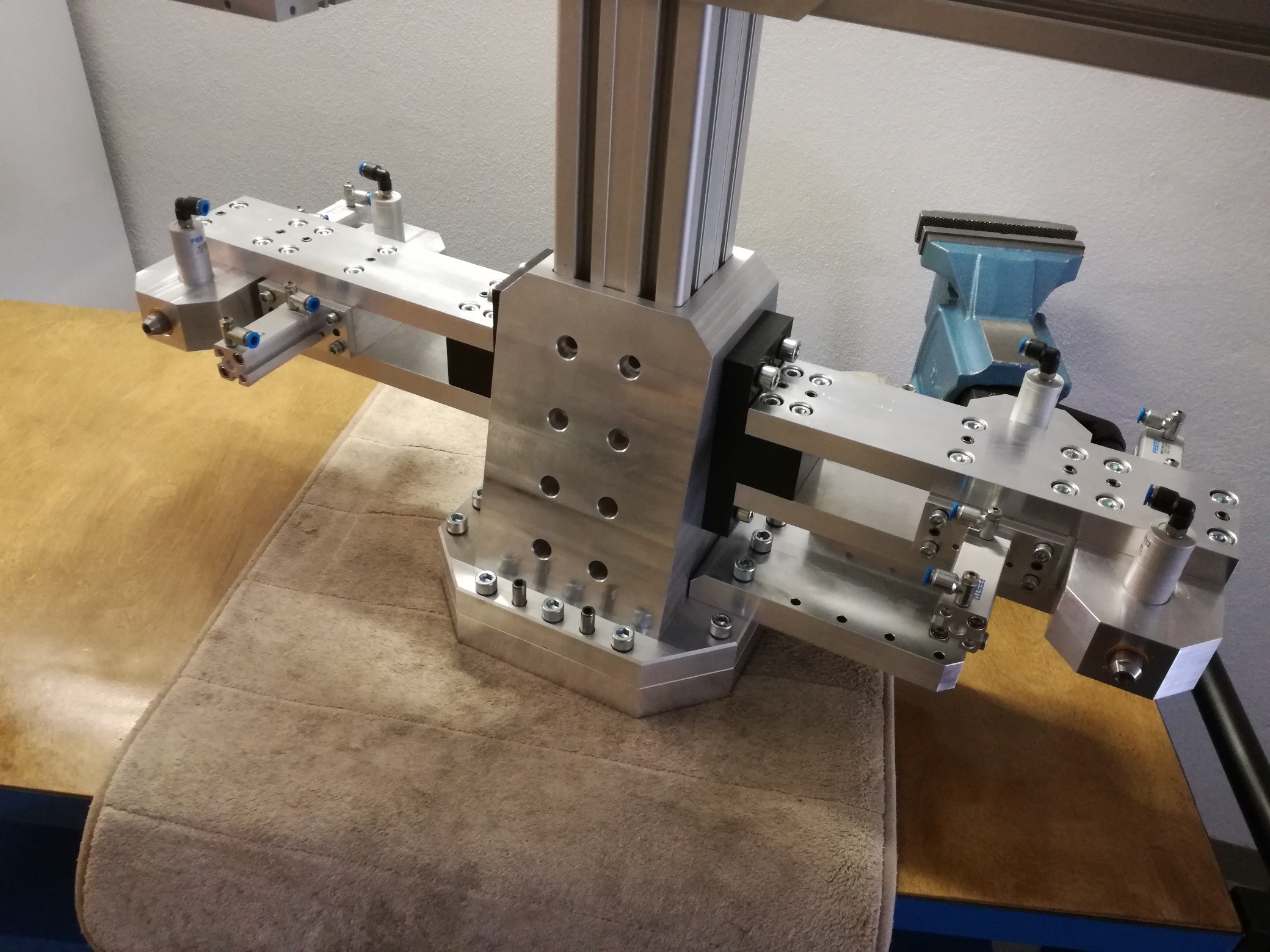
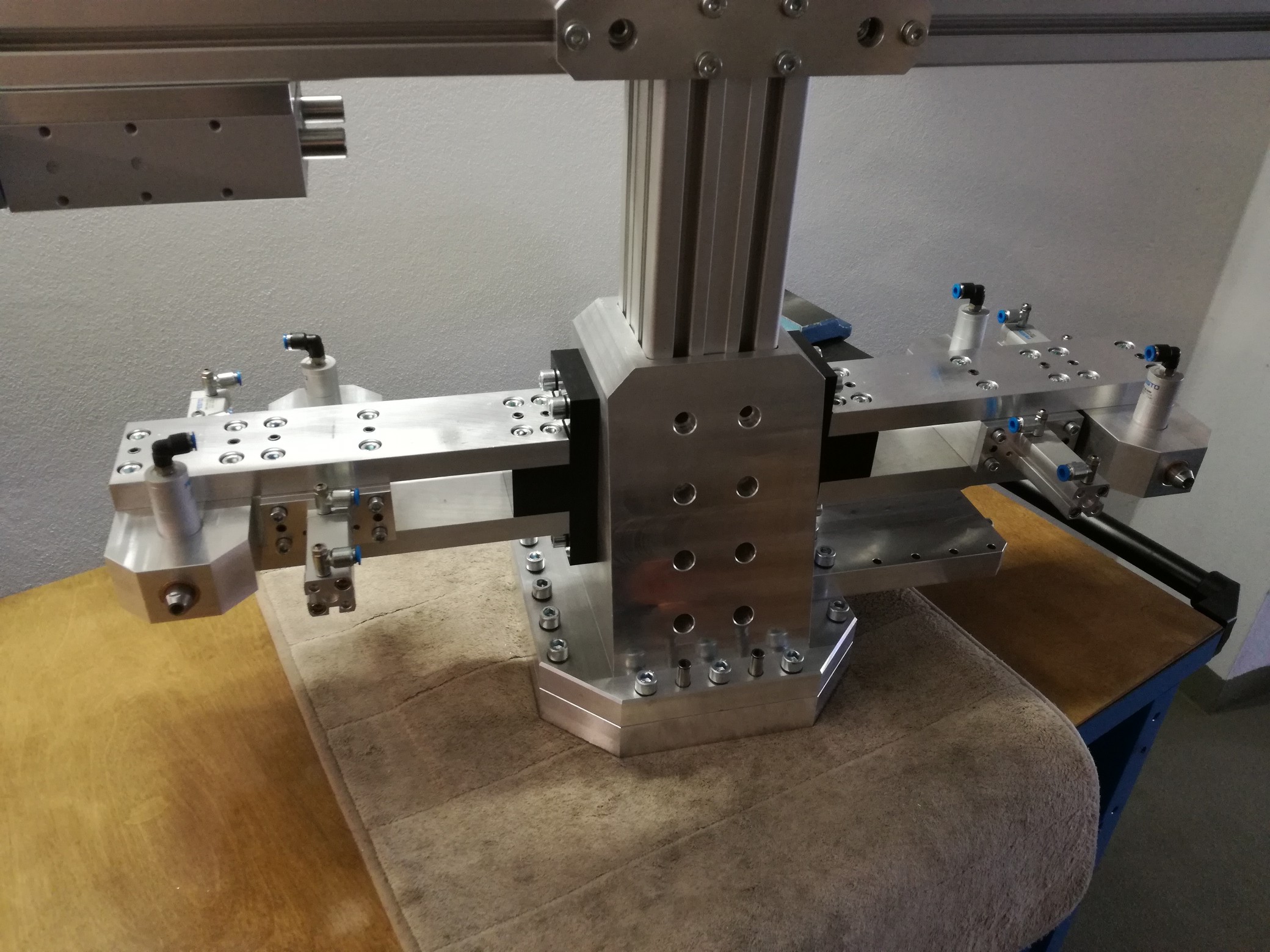
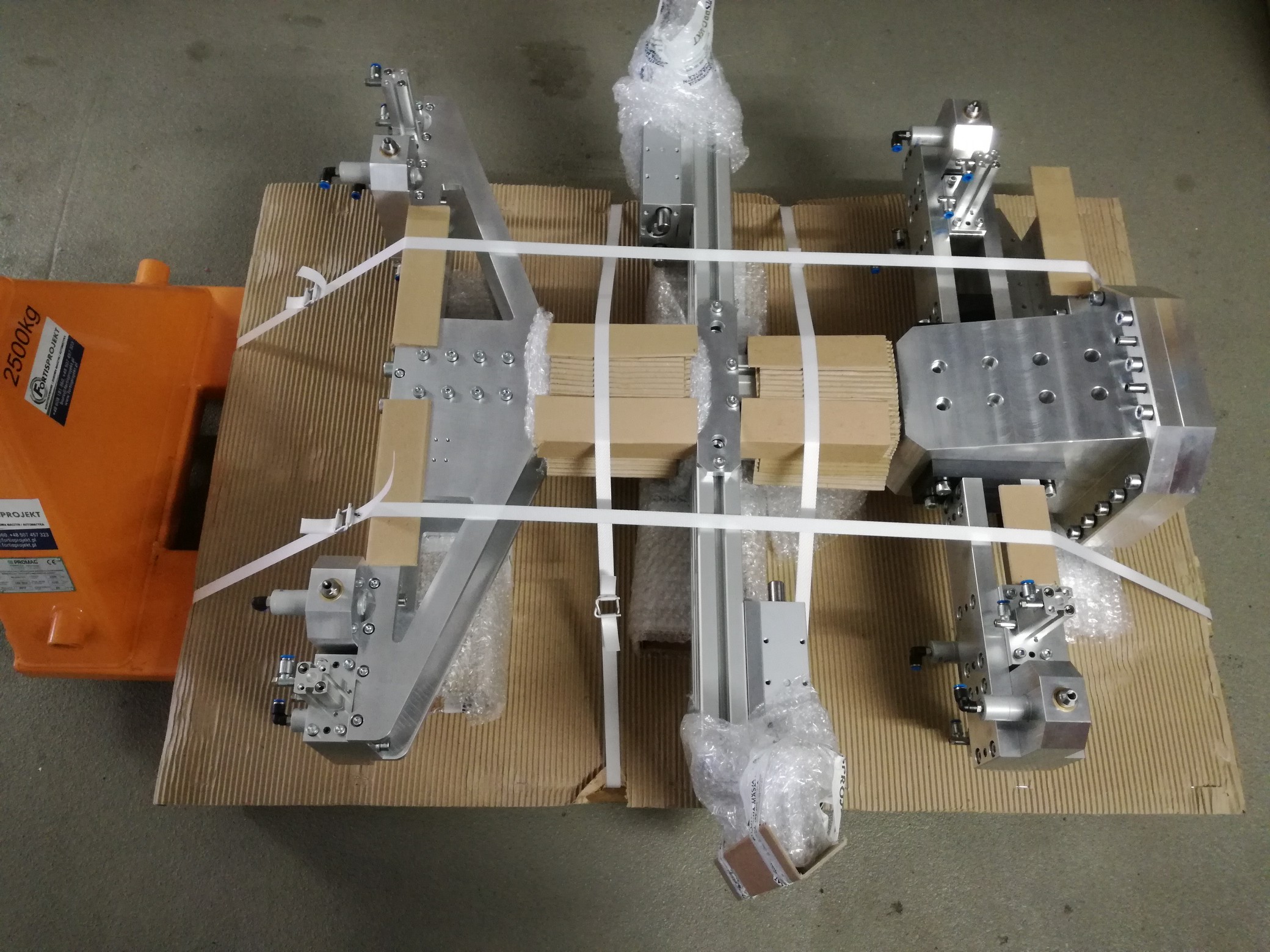
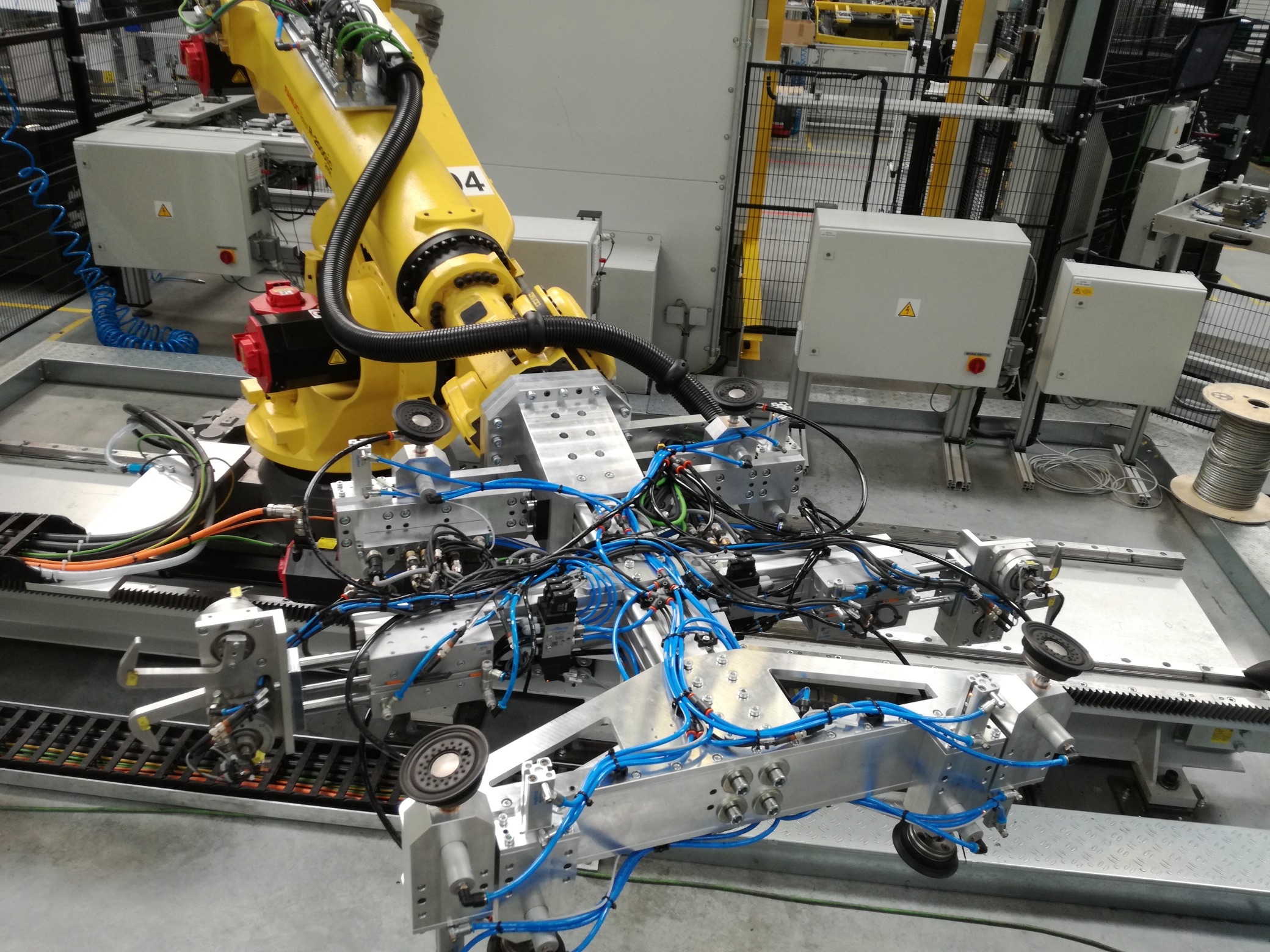
W poprzednim tygodniu zakończyliśmy montaż nowego chwytaka. Układ został już uruchomiony w pełnej produkcji z 100% wydajnością (prędkością robota). Do realizacji tego tematu przystąpiliśmy na życzenie Klienta. Zgłosił się on do nas z problemem pozycjonowania detalu między stacjami jak również z problemem niebezpiecznego odczepiania się detalu podczas ruchu robota przy maksymalnej prędkości. Temat okazał się mocno skomplikowany jednak postanowiliśmy się go podjąć. Konstrukcja nowego chwytka w 90% składa się z aluminium. Łączna waga całej konstrukcji chwytaka wraz z osprzętem wyniosła 75kg. Przystępując do projektowania chwytaka zwróciliśmy szczególną uwagę na sztywność układu. Przy sztywnym układzie mamy gwarancję powtarzalności pozycjonowania. Analizując cały projekt zwróciliśmy również uwagę na bardzo ważny błąd. Producent starego chwytaka wykonał każdą ze stron w innych odległościach co powodowało konieczność przyuczania dwukrotnie większej liczby pozycji robota. My w naszej konstrukcji wykonaliśmy chwytak symetrycznie przestawiając przyssawki co pozwoliło zmniejszyć liczbę pozycji o połowę. W obecnej chwili nie ma znaczenia czy chwytak transportuje detal stroną "A" czy "B". W starej konstrukcji każda ze stron była różna (wyższa/niższa o 40mm). W konstrukcji tego chwytaka na każdą ze stron mamy 4 przyssawki o średnicy fi 114mm. Przyssawki znajdują się na przegubie kulowym dzięki czemu dopasowują się do transportowanego elementu. Wysuw przyssawek zapewnia siłownik o skoku 40mm, który dopasowuje przyssawkę do powierzchni. Każda ze stron przy wysuwie posiada "poduszkę" pneumatyczną, która zapewnia łagodny nacisk na transportowany element. Po wysunięciu przyssawka zostaje zablokowana w określonej pozycji za pomocą hamulca pneumatycznego FESTO KP-16-1000 o nacisku 100kg. Stara konstrukcja chytaka posiadała wiele błędów, które zostały przez nas wyeliminowane. Zastosowaliśmy 4 eżektory (po dwa na każdą stronę). Dzięki temu mamy dwa niezależne układy po przekątnej, które zapewniają bezpieczeństwo. Druga najważniejsza kwestia dla bezpieczeństwa to ciągła kontrola wartości podciśnienia. W programie robota od pobrania do odłożenia mamy ciągłą kontrolę. Jeżeli następuje spadek lub rozszczelnienie robot automatycznie zatrzymuje się. Bezpieczeństwo pracownika jest dla nas bardzo ważne dlatego zawracamy na to szczególną uwagę.